VT-d Posted Interrupt 代码分析
Posted Interrupt是基于Interrupt Remapping机制实现的,关于VT-d Posted Interrupt的原理可以参考VT-d Posted Interrupt,建议先了解原理再来看代码分析。
分析VT-d Posted Interrupt代码的代码需要从vCPU调度入手,为了实现中断的直接投递和中断迁移, 在vCPU调度时候VMM需要为Posted Interrupt做一些额外的工作,但这些额外的工作带来的中断实时性提升是可观的。
per-vCPU Posted Interrupt Descriptor
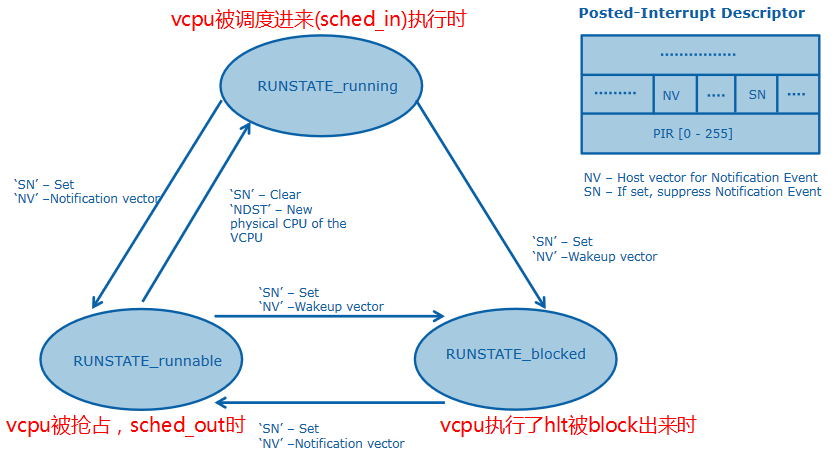
为了支持VT-d Posted Interrup Inter为vCPU引入了Posted Interrupt Descriptor数据结构,其中有pir,on,sn,nv,ndst等几个关键域。
- PIR:记录了要给虚拟机vCPU投递的vector号(由硬件自动写入并由VMM软件读取);
- ON:当中断到来时ON标志位自动置位告知guest我有中断要投递给你了;
- SN:是VMM软件用来告知VT-d硬件当前vCPU不在Running状态你不要给我投中断了我收不到;
- NV:是主机上配合Poste Interrupt工作的一个中断vector(它的值只能是wakeup_vector或者notification vector);
- NDST:存放当前vCPU所在PCPU的apicid(由VMM负责刷新,确保中断可以自动迁移到目的pCPU上)。
/* Posted-Interrupt Descriptor */
struct pi_desc {
u32 pir[8]; /* Posted interrupt requested */
union {
struct {
/* bit 256 - Outstanding Notification */
u16 on : 1,
/* bit 257 - Suppress Notification */
sn : 1,
/* bit 271:258 - Reserved */
rsvd_1 : 14;
/* bit 279:272 - Notification Vector */
u8 nv;
/* bit 287:280 - Reserved */
u8 rsvd_2;
/* bit 319:288 - Notification Destination */
u32 ndst;
};
u64 control;
};
u32 rsvd[6];
} __aligned(64);
首先要明确pi_desc是per-vcpu的,所以在每个vCPU的数据结构struct vcpu_vmx里面会包含一个pi_desc数据结构。
struct vcpu_vmx {
/* Posted interrupt descriptor */
struct pi_desc pi_desc;
}
vCPU创建的时候会将NV置成POSTED_INTR_VECTOR也就是notification event的中断号,同时把SN置1(因为这时候vCPU还没有运行)。
kvm_vm_ioctl_create_vcpu => kvm_arch_vcpu_create => vmx_vcpu_create,这里会注册vCPU的preempt notifier,
当调度器选中vCPU线程的时候VMM会收到通知,VMM调用回调函数进行处理。
static struct kvm_vcpu *vmx_create_vcpu(struct kvm *kvm, unsigned int id)
{
preempt_notifier_init(&vcpu->preempt_notifier, &kvm_preempt_ops); #注册vcpu的preempt notifier
/*
* Enforce invariant: pi_desc.nv is always either POSTED_INTR_VECTOR
* or POSTED_INTR_WAKEUP_VECTOR.
*/
vmx->pi_desc.nv = POSTED_INTR_VECTOR;
vmx->pi_desc.sn = 1;
}
同时kvm_vm_ioctl_create_vcpu => kvm_arch_vcpu_setup => vcpu_load, vcpu_put会对pi_desc做一些修改,
后面结合虚拟机vCPU调度进行代码分析。
vCPU调度与VT-d Posted Interrupt
vCPU的运行状态主要有3种:
- Running 状态:vCPU正处于非根模式下运行
- Runnable 状态:vCPU线程被抢占或者时间片到期,等待OS的下一次调度
- Blocked 状态: vCPU执行hlt指令后从非根模式block出来准备休眠的状态
vCPU调度就是指在VMM的管理下虚拟机的vCPU线程在这几种状态之间切换的场景, 针对不同的状态转变VMM会干预进来为Posted Interrupt做一些额外的工作以确保中断自动迁移可以顺利进行。
vCPU 从 Runnable => Running
当vCPU被调度器选中运行之前会调用VMM的回调函数,在kvm中这个函数时kvm_sched_in。
static void kvm_sched_in(struct preempt_notifier *pn, int cpu)
{
struct kvm_vcpu *vcpu = preempt_notifier_to_vcpu(pn);
if (vcpu->preempted)
vcpu->preempted = false; #将vcpu被抢占的标志位清零
kvm_arch_sched_in(vcpu, cpu); #调整一下ple window
#将VMCS加载到pCPU上准备运行了(这里可能是调度到其他pCPU上运行,也可能是继续在原来pCPU上运行)
kvm_arch_vcpu_load(vcpu, cpu);
}
kvm_sched_in => kvm_arch_vcpu_load => vmx_vcpu_load => vmx_vcpu_pi_load,
vCPU要从Runnable状态切换到Running状态了,
这时候要:刷新NDST为vCPU要运行到的pCPU的apic id,并设置SN=0(告知硬件我现在可以接收Posted Interrupt了)。
static void vmx_vcpu_pi_load(struct kvm_vcpu *vcpu, int cpu)
{
struct pi_desc *pi_desc = vcpu_to_pi_desc(vcpu);
struct pi_desc old, new;
unsigned int dest;
/*
* In case of hot-plug or hot-unplug, we may have to undo
* vmx_vcpu_pi_put even if there is no assigned device. And we
* always keep PI.NDST up to date for simplicity: it makes the
* code easier, and CPU migration is not a fast path.
*/
if (!pi_test_sn(pi_desc) && vcpu->cpu == cpu)
return;
/*
* First handle the simple case where no cmpxchg is necessary; just
* allow posting non-urgent interrupts.
*
* If the 'nv' field is POSTED_INTR_WAKEUP_VECTOR, do not change
* PI.NDST: pi_post_block will do it for us and the wakeup_handler
* expects the VCPU to be on the blocked_vcpu_list that matches
* PI.NDST.
*/
if (pi_desc->nv == POSTED_INTR_WAKEUP_VECTOR ||
vcpu->cpu == cpu) {
pi_clear_sn(pi_desc);
return;
}
/* The full case. */
do {
old.control = new.control = pi_desc->control;
dest = cpu_physical_id(cpu);
if (x2apic_enabled())
new.ndst = dest;
else
new.ndst = (dest << 8) & 0xFF00;
new.sn = 0;
} while (cmpxchg64(&pi_desc->control, old.control,
new.control) != old.control);
}
vCPU 从 Running => Runnable
当vCPU被抢占或者时间片到期的时候vCPU被调度出来,这时候会触发回调函数kvm_sched_out。
static void kvm_sched_out(struct preempt_notifier *pn,
struct task_struct *next)
{
struct kvm_vcpu *vcpu = preempt_notifier_to_vcpu(pn);
if (current->state == TASK_RUNNING)
vcpu->preempted = true; #置上vcpu被抢占标志位
#将vCPU的VMCS从当前pCPU上拿下来,并且保存一下vCPU的相关信息到VMCS中
kvm_arch_vcpu_put(vcpu);
}
kvm_sched_out => vmx_vcpu_put => vmx_vcpu_pi_put,这里vCPU要被调度出来的,
那么要把SN bit置位(中断抑制),告诉硬件我不在运行了,先别给我投递中断,我暂时无法处理。
static void vmx_vcpu_pi_put(struct kvm_vcpu *vcpu)
{
struct pi_desc *pi_desc = vcpu_to_pi_desc(vcpu);
if (!kvm_arch_has_assigned_device(vcpu->kvm) ||
!irq_remapping_cap(IRQ_POSTING_CAP) ||
!kvm_vcpu_apicv_active(vcpu))
return;
/* Set SN when the vCPU is preempted */
if (vcpu->preempted)
pi_set_sn(pi_desc); # set SN bit here
}
vCPU 从 Running => Blocked
当vCPU在Running状态下非根模式执行hlt指令后会被VMM截获发生VM Exit(肯定不能让vCPU在非根模式下中止,这样会浪费CPU资源),
这时候会调用vcpu_block函数来处理。
static inline int vcpu_block(struct kvm *kvm, struct kvm_vcpu *vcpu)
{
if (!kvm_arch_vcpu_runnable(vcpu) &&
(!kvm_x86_ops->pre_block || kvm_x86_ops->pre_block(vcpu) == 0)) {
srcu_read_unlock(&kvm->srcu, vcpu->srcu_idx);
kvm_vcpu_block(vcpu);
vcpu->srcu_idx = srcu_read_lock(&kvm->srcu);
if (kvm_x86_ops->post_block)
kvm_x86_ops->post_block(vcpu);
if (!kvm_check_request(KVM_REQ_UNHALT, vcpu))
return 1;
}
kvm_apic_accept_events(vcpu);
switch(vcpu->arch.mp_state) {
case KVM_MP_STATE_HALTED:
vcpu->arch.pv.pv_unhalted = false;
vcpu->arch.mp_state =
KVM_MP_STATE_RUNNABLE;
case KVM_MP_STATE_RUNNABLE:
vcpu->arch.apf.halted = false;
break;
case KVM_MP_STATE_INIT_RECEIVED:
break;
default:
return -EINTR;
break;
}
return 1;
}
vcpu_block细分为3个阶段Pre Block, Block 和 Post Block。Pre Block阶段会调用pi_pre_block,
这里会将vCPU添加到一个per pCPU的等待链表(waiting list)上,
这个链表记录了所有在这个pCPU上休眠的vCPU列表,然后更新NDST域。
static int pi_pre_block(struct kvm_vcpu *vcpu)
{
unsigned int dest;
struct pi_desc old, new;
struct pi_desc *pi_desc = vcpu_to_pi_desc(vcpu);
# 虚拟机没有配置直通设备 || 不支持Posted Interrupt => 直接返回
if (!kvm_arch_has_assigned_device(vcpu->kvm) ||
!irq_remapping_cap(IRQ_POSTING_CAP) ||
!kvm_vcpu_apicv_active(vcpu))
return 0;
# 关中断, 将当前vCPU线程加入到上次运行的pCPU的等待列表中
WARN_ON(irqs_disabled());
local_irq_disable();
if (!WARN_ON_ONCE(vcpu->pre_pcpu != -1)) {
vcpu->pre_pcpu = vcpu->cpu;
spin_lock(&per_cpu(blocked_vcpu_on_cpu_lock, vcpu->pre_pcpu));
list_add_tail(&vcpu->blocked_vcpu_list,
&per_cpu(blocked_vcpu_on_cpu,
vcpu->pre_pcpu));
spin_unlock(&per_cpu(blocked_vcpu_on_cpu_lock, vcpu->pre_pcpu));
}
#刷新NDST,更新NV为wakeup vector
do {
old.control = new.control = pi_desc->control;
WARN((pi_desc->sn == 1),
"Warning: SN field of posted-interrupts "
"is set before blocking\n");
/*
* Since vCPU can be preempted during this process,
* vcpu->cpu could be different with pre_pcpu, we
* need to set pre_pcpu as the destination of wakeup
* notification event, then we can find the right vCPU
* to wakeup in wakeup handler if interrupts happen
* when the vCPU is in blocked state.
*/
dest = cpu_physical_id(vcpu->pre_pcpu);
if (x2apic_enabled())
new.ndst = dest;
else
new.ndst = (dest << 8) & 0xFF00;
/* set 'NV' to 'wakeup vector' */
new.nv = POSTED_INTR_WAKEUP_VECTOR;
} while (cmpxchg64(&pi_desc->control, old.control,
new.control) != old.control);
#如果在pre block阶段收到了中断,那么就不block了,直接转导Runnable状态去
/* We should not block the vCPU if an interrupt is posted for it. */
if (pi_test_on(pi_desc) == 1)
__pi_post_block(vcpu);
local_irq_enable();
return (vcpu->pre_pcpu == -1);
}
Pre Block阶段过后会调用kvm_vcpu_block,在这个函数中会调用schdule()主动把vCPU调度出去(休眠),让出pCPU执行其他vCPU的代码。
vCPU 从 Blocked => Runnable
可以从这么一种场景理解:如果vcpu0和vcpu1都在同一个物理CPU上运行,某一时刻vcpu0正在运行, vcpu1还处于休眠状态,这是外部设备产生了一个中断需要注入到vcpu1上:
- Device会按照初始化配置的MSI-x中断格式给提交一个Interrupt Reqeust,由于提交的是Remapping格式中断会被IOMMU截获。
- IOMMU查询IRTE解析出vcpu1对应点PD和NV(notification vector),但此时vcpu1还在睡觉,因此NV是被设置成wakeup vector的。
- 物理cpu接收到wakeup interrupt,导致正在运行的vcpu0被kick到root模式下,在wakeup interrupt handler中遍历
blocked_vcpu_on_cpu链表, 得知vcpu1上有个中断需要处理,将vcpu1扔到运行队列中,将vcpu从Block状态变为Runnale状态。
/*
* Handler for POSTED_INTERRUPT_WAKEUP_VECTOR.
*/
void pi_wakeup_handler(void)
{
struct kvm_vcpu *vcpu;
// 获取当前物理CPU的id
int cpu = smp_processor_id();
// 遍历当前物理CPU的blocked_vcpu_list
spin_lock(&per_cpu(blocked_vcpu_on_cpu_lock, cpu));
list_for_each_entry(vcpu, &per_cpu(blocked_vcpu_on_cpu, cpu),
blocked_vcpu_list) {
struct pi_desc *pi_desc = vcpu_to_pi_desc(vcpu);
// 检测vcpu的PD是否ON被硬件置位
if (pi_test_on(pi_desc) == 1)
kvm_vcpu_kick(vcpu); // 唤醒睡眠的vcpu
}
spin_unlock(&per_cpu(blocked_vcpu_on_cpu_lock, cpu));
}
当vCPU休眠结束之后会调用vmx_post_block => __pi_post_block这时候vCPU结束睡眠被重新调度。
注意这里会更新NDST并将vCPU从pCPU等待链表上删除,并且把NV置位POSTED_INTR_VECTOR。
static void __pi_post_block(struct kvm_vcpu *vcpu)
{
struct pi_desc *pi_desc = vcpu_to_pi_desc(vcpu);
struct pi_desc old, new;
unsigned int dest;
#再度更新NDST,因为block睡眠之后被再调度出来执行的时候可能换了pCPU!
do {
old.control = new.control = pi_desc->control;
WARN(old.nv != POSTED_INTR_WAKEUP_VECTOR,
"Wakeup handler not enabled while the VCPU is blocked\n");
dest = cpu_physical_id(vcpu->cpu);
if (x2apic_enabled())
new.ndst = dest;
else
new.ndst = (dest << 8) & 0xFF00;
/* set 'NV' to 'notification vector' */
new.nv = POSTED_INTR_VECTOR;
} while (cmpxchg64(&pi_desc->control, old.control,
new.control) != old.control);
#将vCPU从等待列表中删除掉
if (!WARN_ON_ONCE(vcpu->pre_pcpu == -1)) {
spin_lock(&per_cpu(blocked_vcpu_on_cpu_lock, vcpu->pre_pcpu));
list_del(&vcpu->blocked_vcpu_list);
spin_unlock(&per_cpu(blocked_vcpu_on_cpu_lock, vcpu->pre_pcpu));
vcpu->pre_pcpu = -1;
}
}
剩下一种状态转换路径 vCPU从 Runable => Blocked状态,这和从Running状态切换成Blocked状态一致,这里不再赘述!
整个VT-d Posted Interrupt 工作原理如下图所示:
